中国の研究チーム、体長2センチの自走式昆虫ロボット開発―国営メディア
Record China 2024年5月25日(土) 10時0分
![]()
![]()
![]()
![]()
拡大
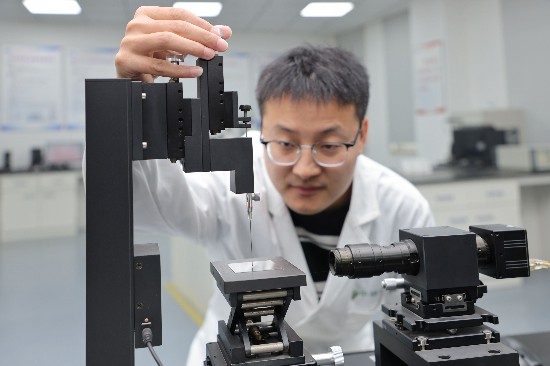
中国の北京航空航天大学の科学研究チームが無線で操作できる昆虫サイズ(体長2センチ)の自走式ロボットを開発した。生体工学に基づく「バイオニック昆虫」とされる。写真は自走式昆虫ロボット。
(1 / 2 枚)
中国の北京航空航天大学の科学研究チームがこのほど、無線で操作できる昆虫サイズ(体長2センチ)の自走式ロボットを開発した、と国営メディアが報じた。生体工学に基づく「バイオニック昆虫」とされ、研究成果は国際学術誌「ネイチャー・コミュニケーションズ」に掲載された。
【その他の写真】
国営新華社通信によると、「昆虫ロボット」を開発したのは、北京航空航天大学エネルギー・動力工程学院の閆暁軍教授らの研究チーム。
閆教授によると、この昆虫ロボットは体長2センチ、幅1センチ、重量1.76グラムで、垂直投影面積は指の爪2枚分しかなく、高速移動、高耐荷重性、無線操作が可能という特徴がある。
通常のロボットはモーターで駆動するため、高いエネルギー供給が必要だが、マイクロロボットの内部は大容量のバッテリーを搭載するのに十分な空間がなく、電力を継続供給するには外部配線が必要なため、自由な動きが制限される。研究チームは長年の研究の末、直線式駆動やフレキシブルヒンジ伝動に基づく新動力システムを開発し、マイクロロボットからモーターと外部配線を取り除くことに成功した。
研究チームのメンバーで同大学の劉志偉・助理教授は「昆虫ロボットの内部にエネルギーや制御、通信、センシングシステムを組み込んだ」と説明。「直線式駆動装置が内部の小型電池からの電気エネルギーを機械エネルギーに変換し、機械振動を外部に出力する。フレキシブルヒンジ伝動メカニズムが機械振動を昆虫の脚の周期振動に変換し、その振動で昆虫全体を動かし、高頻度の跳ねる動きを実現した」と語った。
研究チームのメンバーで同大学博士課程に在籍する詹文成さんによると、研究チームはバイオニック走行も設計し、昆虫ロボットの歩調や歩幅を適応調整することで、高荷重状態での高速爬行(はこう)を実現した。運動軌道を正確に制御するため、昆虫ロボットの両脚の振動数の差に基づく制御方法を採用しているという。
閆教授は「このマイクロパワー技術の開発に成功したことで、災害時の捜索・救助活動、大型機械設備やインフラの損傷検知など、マイクロロボットの開発と応用が幅広く進むことが期待できる」との見通しを示した。(編集/日向)
関連記事
かつては日本が独占、量子コンピューターのコア部品を中国が完全国産化―香港メディア
Record China
2024/5/17
「日本は完全に中国に負けている」=舛添要一氏の見解に中国ネットで異論噴出
Record China
2024/5/16
U-17女子日本代表に惨敗の中国監督「格が違った」、中国メディア「差は明らか」
Record China
2024/5/14
日本の有名企業IHIはなぜ40年も不正を続けたのか―中国メディア
Record China
2024/5/13
韓国半導体、8年後に台湾を上回り世界市場シェア2位に=韓国ネット「LINEも守れないのに?」
Record Korea
2024/5/10
外国の自動車メーカーが競って中国の技術を採用―英メディア
Record China
2024/5/6
ピックアップ











この記事のコメントを見る